La partie opérative
C'est quoi la partie opérative ?
La partie opérative, appelée aussi PO, désigne la structure du robot, y compris les actionneurs, les effecteurs et les capteurs. Elle est généralement commandée par un automate programmable, qui peut également être un ordinateur dans les cas les plus complexes, connecté à une ou plusieurs interfaces appelées entrée/sortie.
Cette partie opérative dépend toujours d'une partie de commande. Le schéma ci-dessous résume cette relation :
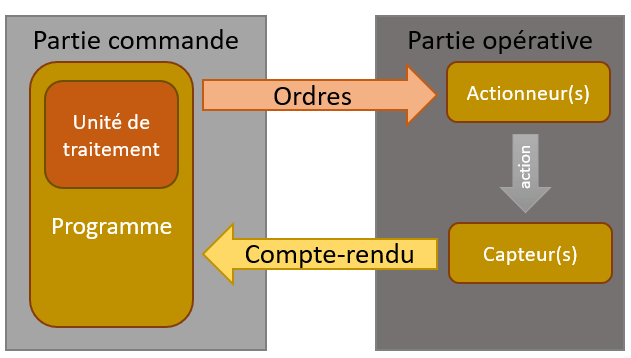
La partie opérative (PO) est ainsi le squelette du robot. Elle exécute les ordres envoyés par la partie commande, effectue la tâche requise et renvoie un compte rendu en retour à la partie commande. Elle assure son fonctionnement grâce aux différents sous-ensembles de nature, physique, électronique, mécanique reliés entre eux par des liaisons mécaniques ou même électromécaniques, qui interagissent entre eux afin d’accomplir l’objectif souhaité.
De quoi est composé la partie opérative ?
La partie opérative est composé essentiellement de quatre grands sous-ensembles sont notés comme suit :
- de pré-actionneurs: ils font le relais de puissance adaptée entre la partie commande (PC) et les actionneurs. Ils sont en général de nature pneumatique ou électrique. Ils peuvent être des pré actionneurs de type TOR (Tout Our Rien), monostable ou bistable. Par exemple des contacteurs pour les moteurs électriques.
- de actionneurs: ils exécutent les ordres envoyés par la partie commande et effectuent des actions physiques à partir de l’énergie qu’ils les reçoivent. Ils peuvent être de nature pneumatique, hydraulique ou électrique. Par exemple des moteurs pour assurer un déplacement.
- de capteurs: ils mesurent des grandeurs physiques dans leur environnement, les convertissent en grandeurs exploitables puis ils les envoient à la partie commande. Ils sont de nature pneumatique, électrique ou mécaniques. ils peuvent être des capteurs de position, de distance, de température……. Par exemple un thermomètre pour mesurer la température.
- de effecteurs: ils sont en général les effecteurs terminaux : ils sont les outils qui réalisent la tâche finale. Ils sont contrôlés par les actionneurs. En robotique, les effecteurs sont mécaniques ou électromécaniques. Ils peuvent être des pinces, des outils de traitement ou simplement des capteurs. Par exemple, pince de deux doigts pour effectuer des taches de prélèvement
| Les sous-parties | La partie commande > |
📝 La dernière modification de cette page a été faite le 27 May 2026 par Electro & Robot